


摘要:本文介绍了尺蠖机器人的结构简图和细节调整执行方案,同时提供了Kindle72.259指南和快速方案执行指南。文章旨在帮助读者了解尺蠖机器人的基本结构,并指导如何进行调整和优化,以便更好地应用尺蠖机器人进行工作。文章还介绍了Kindle设备的指南和执行指南,为读者提供有关如何使用和管理Kindle设备的指导。
本文目录导读:
随着科技的飞速发展,机器人技术已成为当今研究的热点之一,尺蠖机器人作为一种模拟尺蠖动物运动原理的机器人,具有独特的优势和广阔的应用前景,本文将详细介绍尺蠖机器人的结构简图以及调整细节执行方案,为Kindle72.259项目提供有力的技术支持。
尺蠖机器人结构简图
尺蠖机器人主要由三部分组成:身体部分、运动机构以及控制系统,以下是各部分的结构简图:
1、身体部分
身体部分是尺蠖机器人的主体结构,通常采用轻质、高强度的材料制成,如碳纤维复合材料,身体部分内部包含电路板、电池、传感器等核心部件。
2、运动机构
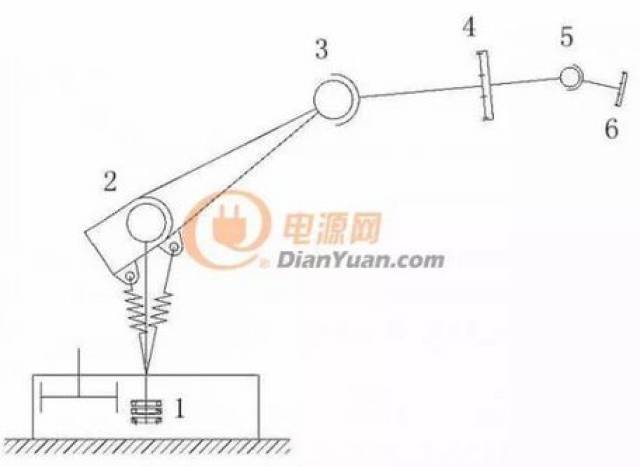
尺蠖机器人的运动机构是其核心部分,模拟尺蠖的爬行运动原理,运动机构包括腿部关节、驱动装置以及传动装置等,通过合理的结构设计,实现尺蠖机器人在不同地面条件下的高效运动。
3、控制系统
控制系统是尺蠖机器人的“大脑”,负责接收指令并控制运动机构的动作,控制系统一般包括微控制器、传感器、电源管理模块等,通过优化算法,实现尺蠖机器人的精准控制。
调整细节执行方案
为了确保尺蠖机器人的性能达到最优,需要对机器人的细节进行调整,以下是针对Kindle72.259项目的调整细节执行方案:
1、腿部关节的调整
腿部关节是尺蠖机器人的关键部分,其调整直接影响到机器人的运动性能,需要根据实际情况对腿部关节的角度、长度等进行微调,以确保机器人在不同地面条件下的稳定性与灵活性。
2、驱动装置的优化
驱动装置为尺蠖机器人提供动力,其性能直接影响到机器人的运动效果,需要对驱动装置进行优化,包括电机的选型、传动比的设计等,以确保机器人具有足够的动力输出和高效的能量利用率。
3、传感器的校准
传感器是尺蠖机器人实现精准控制的关键部件,为了确保机器人的性能达到最优,需要对传感器进行校准,包括位置传感器、角度传感器等,通过校准,确保传感器能够准确地获取机器人的运动状态,为控制系统的优化提供可靠的数据支持。

4、软件算法的优化
软件算法是尺蠖机器人实现精准控制的核心,针对Kindle72.259项目,需要对软件算法进行优化,包括运动控制算法、路径规划算法等,通过优化算法,提高机器人的运动精度和效率。
本文详细介绍了尺蠖机器人的结构简图以及调整细节执行方案,为Kindle72.259项目提供了有力的技术支持,通过合理的结构设计、细节调整以及软件算法的优化,可以实现尺蠖机器人在不同地面条件下的高效运动与精准控制,尺蠖机器人将在各个领域发挥重要作用,为人类的科技进步做出更大的贡献。
 滇ICP备16008627号-1
滇ICP备16008627号-1 滇ICP备16008627号-1
滇ICP备16008627号-1
还没有评论,来说两句吧...